新機体の紹介 ~obsidian~

みなさま初めまして.よつと申します.
この記事はWMMC Advent Calendar 2024 7日目の記事です.アドカレ用にブログを始めてみました.
昨日の記事はJamesくんの全日本学生マイクロマウス大会2024に参加した話でした.共に徹夜開発をした後輩が無事に最短走行まで成功したのはとても喜ばしいことですね.
はじめに&自己紹介
さて,この記事はマウス歴2年目の私がDCマウスを作ってみたので見てみて~という内容です.
一応これからDCマウスを作りたい人を後押しする内容にしたいですが,文章を書くのが苦手なので駄文が生成されると思います.なので気が向いたら読んでください.
初めての記事なのでどんな人間か書いておくと,およそ1年半前,学部4年の卒論が終わった時期に研究室同期に誘われたことがきっかけでマウスを始めました.工学学士をとっているものの,メカもエレキもソフトもよくわからん状態でのスタートです.
2023年シーズンはサークル標準機体のNucleoマウスを製作し,関西大会と学生大会で完走.全日本大会にはスラロームと直線加速・前壁補正などを実装して臨み,フレッシュマン賞をワンちゃん取れるかと思いきや海外勢のDCマウスに敗れる等しました.
物理量への挑戦も考えましたが,それならいっそDCマウスを作ってしまえと製作したのが新機体です.
新機体 クラシックマウス obsidian
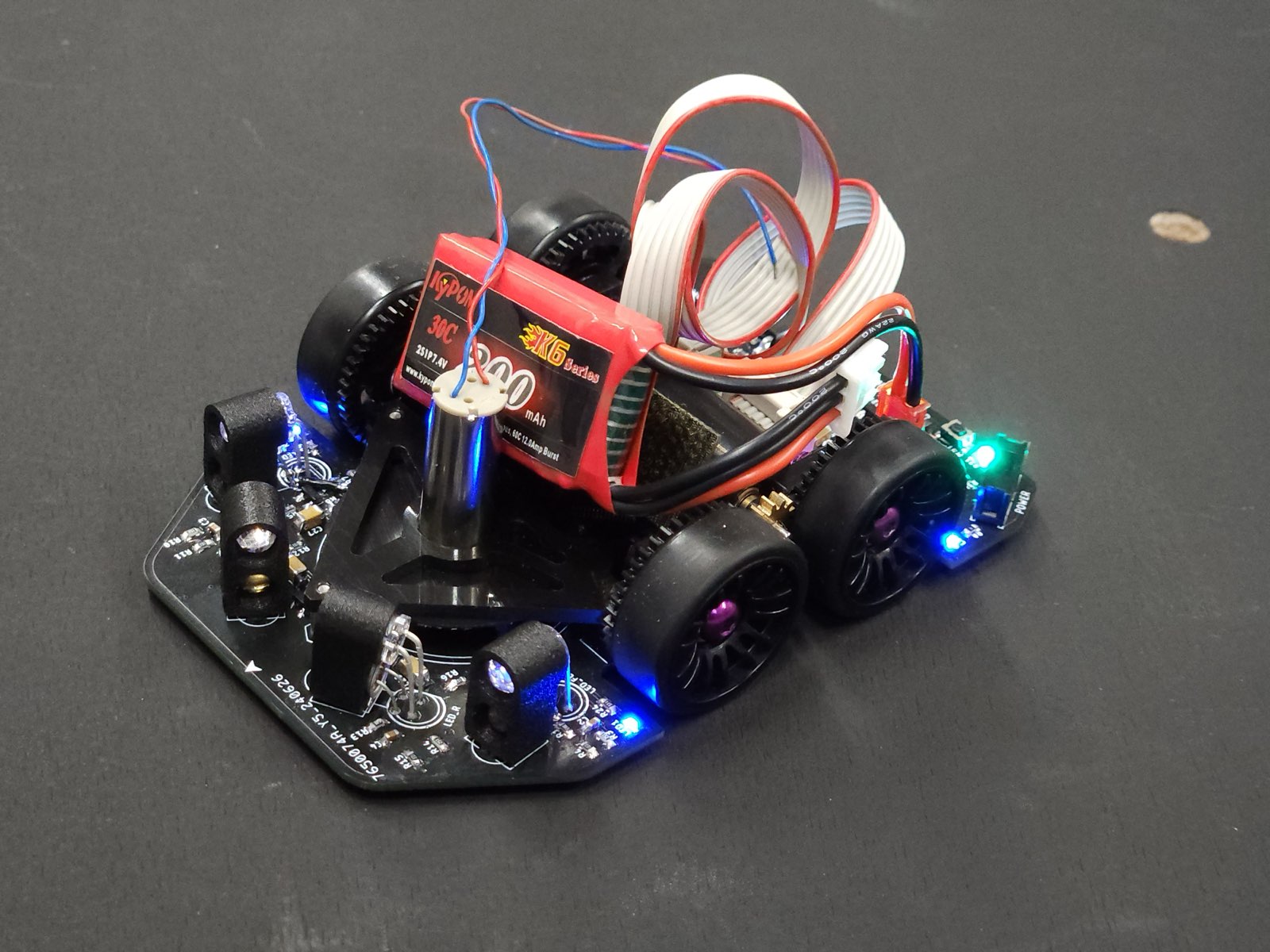
この機体をなんとな~く設計し始めたのは2024年3月ごろ.6月から本格的に取り組み始め,メカとエレキの設計が終わるまでが1ヶ月程度.
7月7日に行われたデンソーカップでは後述するエレキのコピーもとであるNightfallのソフトを拝借し,パラメタだけ調整して挑み無事に最短走行を行いました.それなりに安定して走れるハードが作れたことが確認でき安心した覚えがあります.しかし,デンソーカップは公式大会ではないため完走証が与えられず,全日本大会に出場するためには他の大会での完走が必要でした.
そんな状況の中Nightfallのソフトとは決別し,C++で一から書き始めたのが9月.とりあえず先日の学生大会で探索走行できるようになるまでに3ヶ月かかりました.
学生大会の話は後半で書こうと思いますが,一つ思うのはこれってかなりハイペースなはずなんです.なんてったって隣に参考にできる実物の機体といつでも質問できる先駆者(研究室同期)をおいて開発してましたから.なのにこれより遥かに速いスピードで成長する方々がいることが恐怖ですよね.
設計思想的なもの
正直そんな高尚なものは存在しないしとにかく早く作ることで精一杯でしたが,強いて言えば安定していてソフトのとおりに動いてくれる機体です.
私がマウスを始めた&続ける理由の一つは賢いロボットを作りたいからです.そのソフトウェア開発に障害とならないハードウェアが作れたら良いと考えていましたし,実際にそれなりに直進性も良く低イナーシアな機体が作れたなと考えています.
(標準機体のNucleoマウスでは左右のモーターの制御が入れ替わっている謎バグがあるので,その相手をしなくて良いだけで嬉しい)
メカ
obsidian最大のこだわりポイントがここ.
スパーギア,モーターマウント,吸引ファン,ファンマウントすべてPOMのCNC切削で作りました.おそらくPOM切削の利点は軽量な割に剛性が高いことだと思っています.未だに機体の質量や剛性等が問われるスピードで動いていないので確証はありませんが,今後に期待ですね.強度じゃなくて剛性だよな~って当時夜中の2時に寝ながら書きましたが,POMはアクリルに比べて耐衝撃性が高いので強度のほうが正しい用語な気がしてきました.(2024/12/11 編集)
ファンの設計はこちらの記事を参考にしつつ,高さよりも直径が重要だというアドバイスを受けたのでより薄く,より大きくなるように設計しました.
私はたまたま手元にCNCが使える状況だった∧CNCをいじってみたかった∧極度の金欠だった ため自分で切削しましたが,時間とお金にそれなりに余裕があればJLCとかに投げたほうが楽だと思います.
ただ切削手順や位置決めの方法を考えながら設計するのも楽しいものだと感じますね.
おそらく見せても問題ないはずなので,大体の雰囲気はこのcadで見れると思います.(本当はSTLをページに埋め込みたかった)
エレキ
作る前は一番難しそうだと感じていた部分でした.が,一度作ってしまえばどうにかなるもんだなと言うのが感想です.
その理由の一端を担っているのは参考元があるからですね.上にも書きましたが,obsidianのエレキは研究室同期の機体, Nightfallの95%コピーです.ただ,もしコピーできずとも,動いている機体の回路構成を見るだけでかなり勉強になると思います.
Nightfallはその前作とほとんど同じなため,詳細はそっちに任せて,こだわりだけ書きます.
こだわり① 書き込みはSWD
WMMCではマイコンへの書き込みにUARTを使うのが主流だったようです.過去の技術の流れは知りませんが,少なくとも今はSWDを使うことを強くおすすめします.SWD接続はST-Linkでもできますが,自分はST-LinkをJ-Link化したものを使っています.
UART経由で接続→書き込み→解除と1分ほどかかる作業が,J-Linkを使えば6秒で終わります.その速さなんと10倍!!!
デメリットと言えば通信用に引き出すべき線が2本増えることですが,ソフト側で対応すればRX, TXピンなしでpritf出力もできるようになるため,将来的に必要な本数は同じになります.
Nightfall(参考元) | obsidian |
|---|---|
 |  |
↑J-Link?なんそれ?となった人向け
(STM32 Nucleo-64ボードの上側を切断して使える書き込み機がST-Link,それにJ-Linkのファームウェアを書き込んで使用することができる)
詳しくは以下をご参照ください
こだわり② 電源段にPch MOSFET
文字通り電源段にPch MOSFETを入れてあります.参考元ではスライドスイッチに直接リポからの電流が流れます.そこでスライドスイッチをMOSFETのGateに接続することで,大電流はMOSEFTを通るようになります.
競技的には動作するなら可能な限り部品点数を少なくするべきですが,頻繁に触る上に樹脂でできた部品に定格以上の電流がながれるのが嫌だったので導入してみました.
Nightfall(参考元) | obsidian |
|---|---|
 |  |
ソフトウェア
まだ極めて発展途上なので何も書くことがないのですが,強いて言えばC++に挑戦してなるべくオブジェクト思考で書くように頑張ってます...
全日本学生大会の結果
試走会の前日,金曜日あたりからずっと探索におけるバグが取り切れず,結局場当たり的に標準プログラムを移植して直せたのが本番当日の朝7時.もうなにか手を付けるのも怖かったため,行きの探索のモードだけを実装して本番に挑みいました.結果としては4回の試技で
- 00:54.098
- R
- 00:54.019
- 00:53.969
となりました.2走目のリタイアは制御開始直後に暴走するという既知のバグが発生しましたが,それ以外は非常に安定して走行することができました.
まだまだバグや修正すべきところしかない状態ですが,なんとか無事に完走できて良かったです.
また,これほどまで限界ギリギリの開発は試走会での調整やセミナーハウスでの宿泊という恵まれた環境がなければ不可能だったでしょう.運営に携わったMiceや東京工芸大学からくり工房のみなさまに改めてお礼申し上げます.
さいごに
明日はXFA-27くんの「なにか」です.学生大会で様々な表彰を受けた彼の記事に期待が高まりますね.
参考文献
編集後記
勢いに任せてアドカレに登録してみたもののホームページすらもっていなかったので,急ごしらえしてみました.天邪鬼なので既存のブログサービスやWordpressを使いたくなかった結果,完成はしたもののデザイン面は間に合いませんでした.追い追いNext.jsとか勉強しながら実装していきます.
とりあえずこのホームページの構成についてはまた後日書きたいと思います.

よつ
WMMC OB 社会人1年目 のよつです。 マイクロマウス暦3年 よさこいとルービックキューブが趣味です。 クラシックマウス:obsidian